|
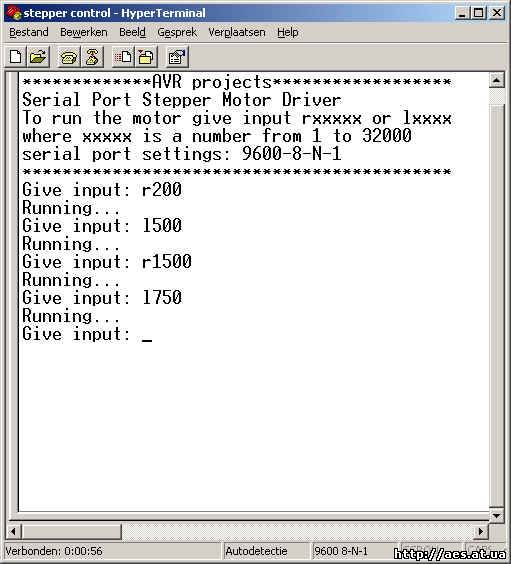
Терминал программы, такие, как HyperTerminal можно использовать для управления шаговыми двигателями.
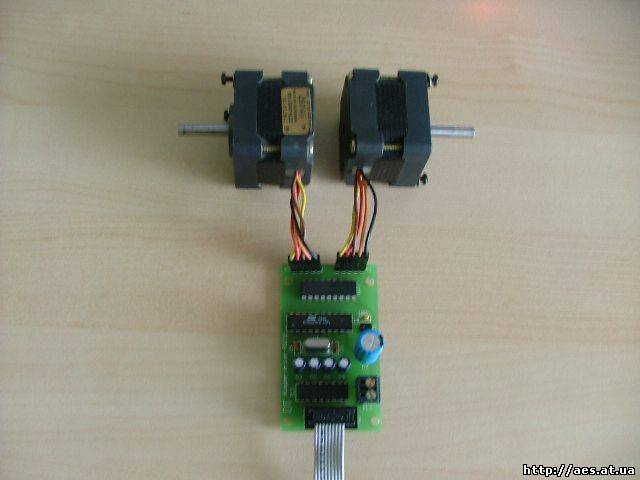
В этой схеме можно контролировать два шаговых двигателя шагом через RS232 порт вашего компьютера.
-шаговые двигатели до 24В, 500мА
-Электропитание ......... 12-24 VDC
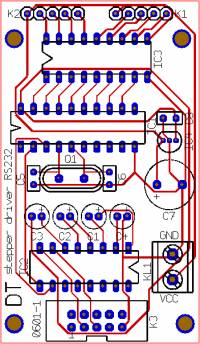

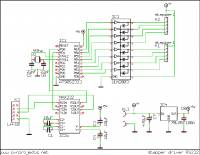
Оборудование
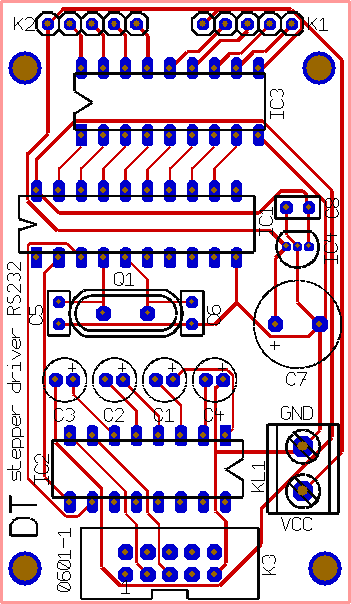
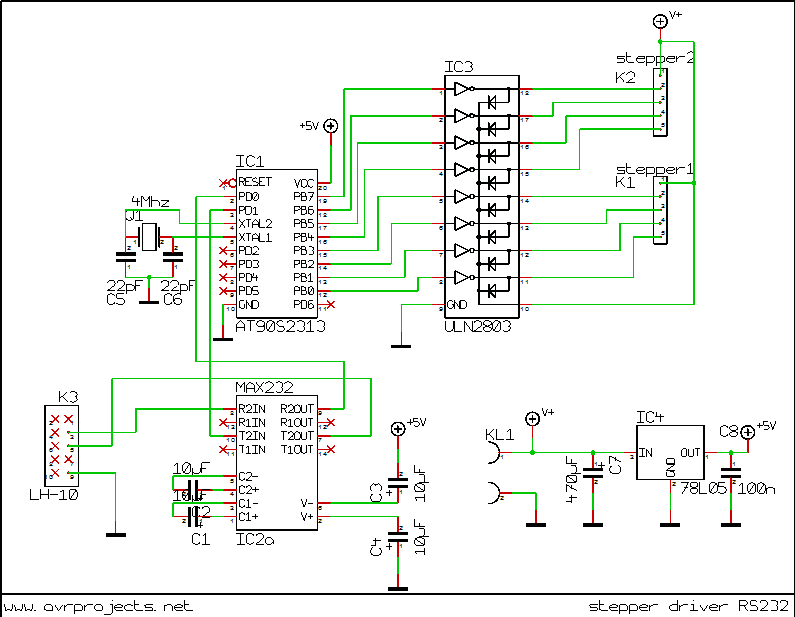
А MAX232 IC используется для преобразования сигналов из последовательного порта ПК на уровне TTL . А AT2313 принимает сигналы от последовательного порта и управляет шаговыми двигателями.
Сигналы от МК поступают через ULN2803A которая является драйвером, для нагрузки до 500мА.
Двигатель может быть повернут влево или вправо, отправив команды с терминала программы. Максимум 32000 шагов может быть достигнуто в каждой команде.
Чтобы синхронизировать программу терминала с шаговым двигателем нужно сделать следующие настройки терминала:
COM1 - 9600 baud - data bits 8 - 1 stop bit - No parity bit - No handshake.
В COM порт нужно настроить для порта, который вы используете на вашем компьютере.
Есть 4 команды, которые можно направить на шаговый контроллер:
m0rx и m0lx и m1lx и m1rx.
В X в команде это число от 0 до 32000. Если вы посылаете команду m0l2000 двигателя 0 очереди часами мудрым 2000 шагов, и если вы отправляете m0r2000 двигателя 0 превращает борьбу часы мудрым 2000 шагов.
После мощностью совета, сообщение отображается в Вашей программе терминала. Вы можете давать команды для управления шаговыми двигателями. См. пример ниже.

Скачать .bas и .HEX
|