|
Характеристики устройства выглядят не слишком выдающимися, но регулятор и не претендует на профессиональное использование.
Частота управляющего ШИМа 3кГц
Внутреннее сопротивление 0.1 Ом
Напряжение питания 4.8В - 7.2В
Размер платы (делал на монтажной ) 50 х 25 мм
Относительно высокое внутреннее сопротивление обусловлено простотой конструкции, которая рассчитана на работу в HPI RS4 micro со стандартным мотором. На четырех банках GP2200 транзисторы горячие, но держат. Машинка катается все 40 минут без проблем.
Если вы захотите использовать регулятор с более мощными моторами, то для увеличения рабочих токов можно сделать следующее:
в первую очередь, заменить транзисторы IRF9Z34 на IRF4905 (хотя они дороже)
установить транзисторы на радиатор
поставить несколько транзисторов параллельно
Для упрощения конструкции, в прошивке удалена процедура, защищающая от случайных включений, из-за небольшого интервала холостого хода. В принципе ее можно вернуть, исключив команду «goto aap» в тексте программы. Также отсутствует режим тормоза, вместо него используется задний ход.
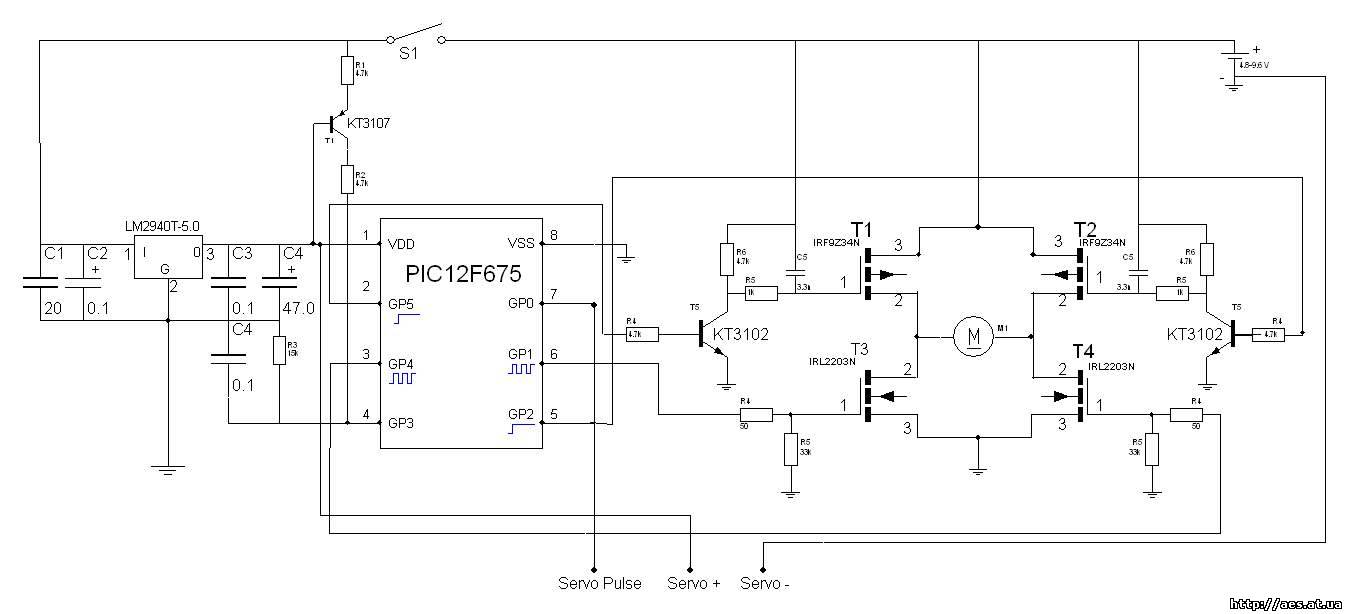
  Конструкция практически не отличается от своего собрата без реверса. Добавлена пара транзисторов и цепочек управления.
Программа регулятора рассчитана под микроконтроллер PIC 12 F 675 или PIC 12 F 629. Это позволяет при необходимости менять характеристики прошивки. В принципе, можно использовать и PIC 12 C 509.
Прежде чем прошивать микроконтроллер необходимо считать поправочную константу. Если при подключении регулятора, в нейтральном положении курка двигатель вращается вперед — необходимо увеличить значение поправки, и наоборот. После этого прошить контроллер с новым параметром.
Для настройки управляющей характеристики регулятора (зависимости мощности от положения курка передатчика) сделана небольшая утилита. В данной версии она может читать файл *. inc и отображать его в виде графиков. Первый график — зависимость размерности от количества отсчетов, второй — зависимость мощности от длительности управляющего импульса. Во втором режиме возможности редактирования пока нет.
Источник
|